Products
Sensors and GPS
FlyingRC L4CAN RM3100 CAN Compass Module
A CAN-bus compass module built around the PNI RM3100 geomagnetic sensor and AP_Periph-style firmware. It gives autopilots cleaner heading data when the main flight controller is affected by current, motors, or magnetic interference, while keeping remote communication on a robust CAN link.

Best used for
- ArduPilot or PX4 aircraft that need a remote compass on CAN.
- Fixed-wing or multirotor builds where the main flight controller is close to high-current wiring.
- UAV, RC aircraft, robot positioning, vehicle navigation, AHRS, and magnetic-field detection uses.
Key features
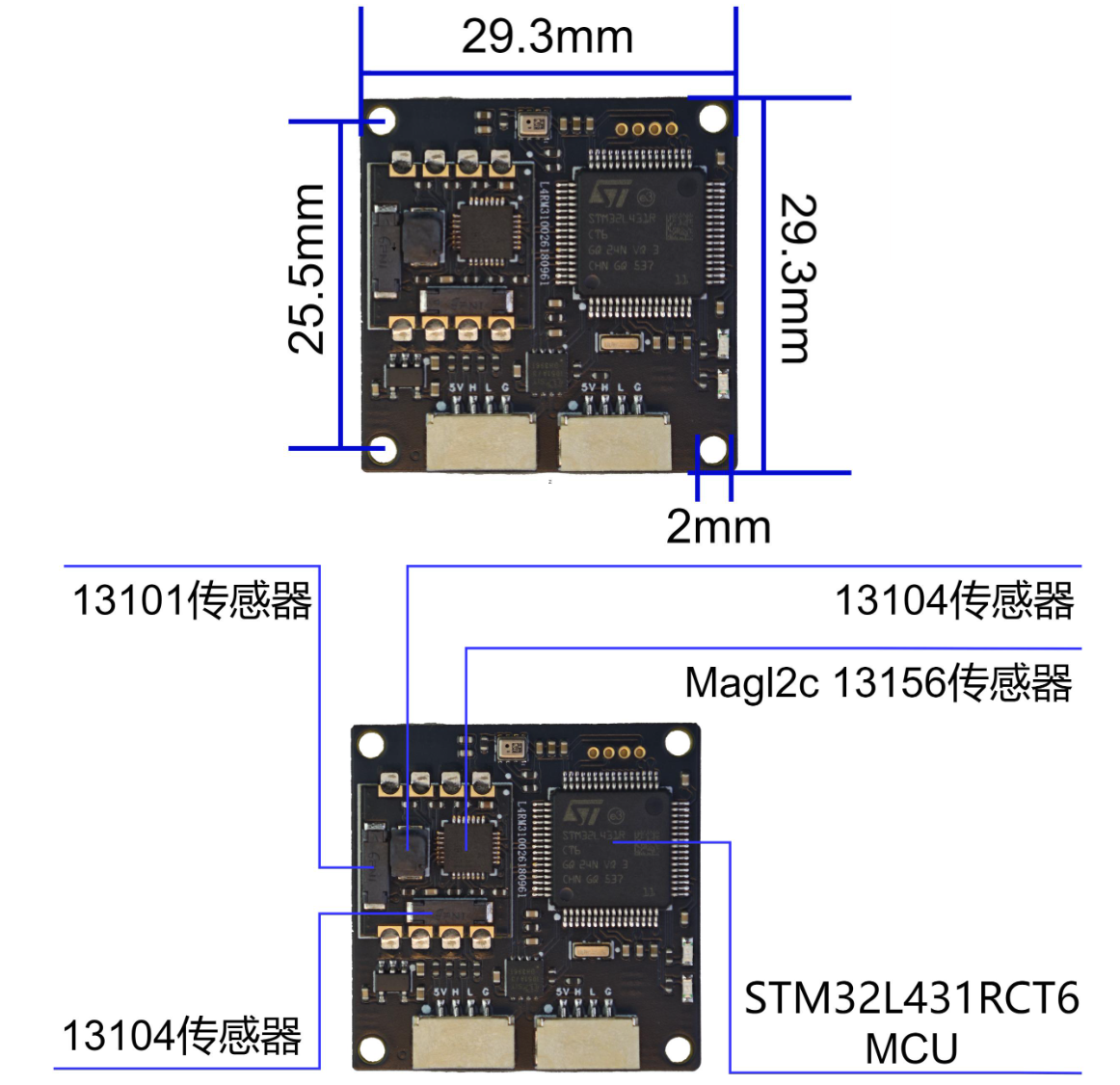
- Uses PNI RM3100 3-axis geomagnetic magnetometer IC with X/Y sensors, a Z sensor, and MagI2C ASIC controller architecture.
- Industrial-grade RM3100 compass sensor for high-resolution, repeatable heading data.
- CAN communication for remote mounting and stable wiring.
- Supports AP and PX4 firmware workflows according to the listing material.
- Includes 3D printed base, GH1.25 4P cable, and mounting screws in the package list.
Setup / wiring notes
- Mount at least 10 cm away from power wires, ESCs, motors, magnets, and ferrous metal materials.
- If the CAN cable is long, short the onboard 120 ohm termination jumper as needed for the bus layout.
- After installation, configure CAN/AP_Periph parameters and run compass calibration in the flight firmware.
Check before use
- Compass accuracy depends on magnetic cleanliness, orientation, CAN bus wiring, and correct firmware setup.
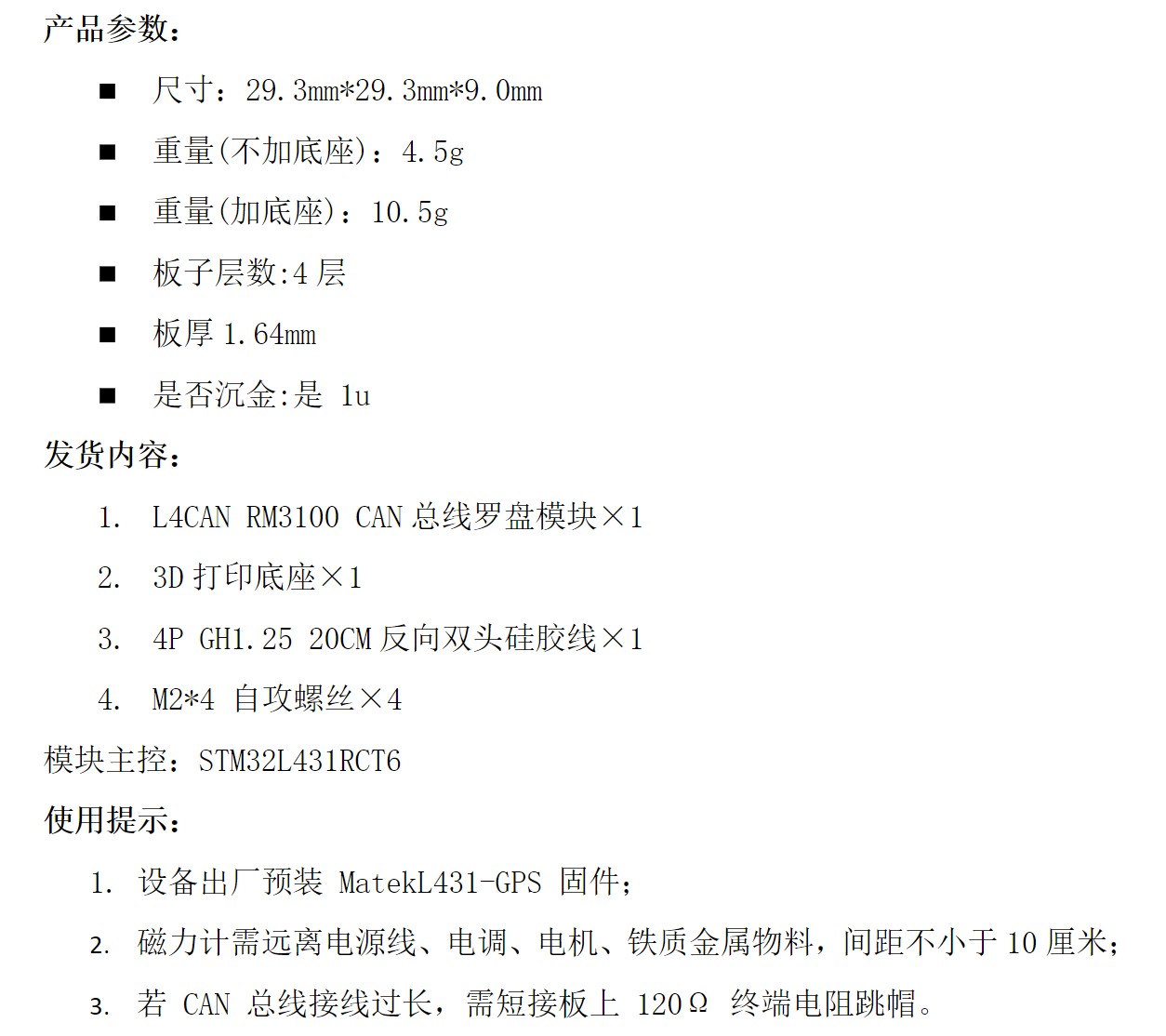
Key specs
- RM3100 CAN-bus compass module
- STM32L431RCT6 controller with AP_Periph-style firmware workflow
- 29.3 x 29.3 x 9.0 mm board size
Reference files
Wiring / dimensions / specs